摘要:本文详细介绍了 Unitree SDK2 中基于 DDS (Data Distribution Service) 构建的工业级通信中间件。该框架通过多层封装,为宇树(Unitree)机器人(如 Go2、G1 等)提供了高性能、低延迟且跨平台的通信能力,并完美兼容 ROS2 生态系统。
1. 核心架构概览
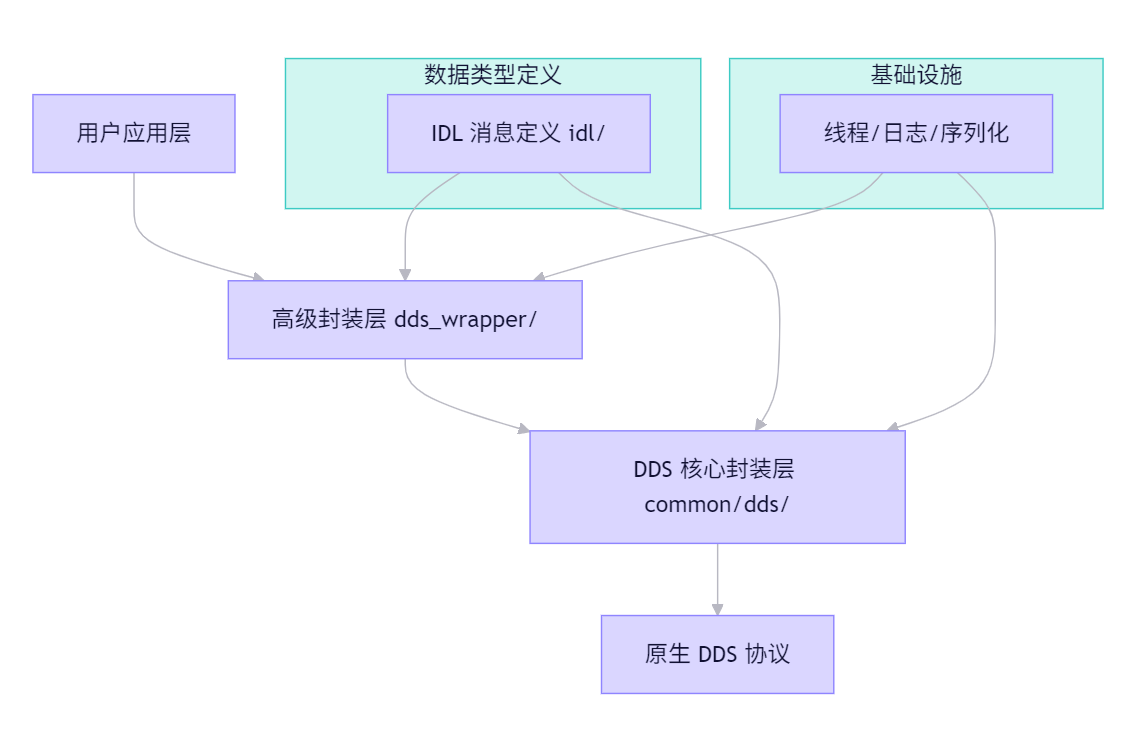
Unitree SDK2 的通信层建立在标准的 DDS 协议之上,通过分层设计实现了从底层协议到上层应用逻辑的解耦。整体架构主要分为 DDS 基础封装层、高级功能封装层 以及 数据类型定义层。
架构图示
2. 模块详细拆解
2.1 DDS 层封装 (common/dds/)
这是通信框架的基石,提供了对 DDS 标准的完整抽象,屏蔽了不同 DDS 实现(如 FastDDS, CycloneDDS 等)的差异。
核心组件
| 组件文件 | 功能描述 |
|---|---|
dds_entity.hpp | 实体管理:统一管理 DomainParticipant, Publisher, Subscriber 等 DDS 核心实体生命周期。 |
dds_topic_channel.hpp | 通道管理:负责 Topic 的创建、注册与查找,确保通信双方主题一致。 |
dds_parameter.hpp | 参数配置:处理通信相关的动态参数配置。 |
dds_qos*.hpp | QoS 策略:配置可靠性 (Reliability)、耐久性 (Durability)、截止时间 (Deadline) 等服务质量策略。 |
编程模型
为了适应不同开发需求,提供了三种编程范式:
- 简易模式 (
dds_easy_model.hpp):面向快速开发,提供极简 API,隐藏复杂配置。 - 工厂模式 (
dds_factory_model.hpp):面向模块化开发,通过工厂类统一创建通信对象。 - 原生模式 (
dds_native.hpp):面向高级用户,直接暴露原生 DDS 接口,提供最大控制粒度。
异常与回调
- 异步回调 (
dds_callback.hpp):基于事件驱动的异步数据接收机制,避免阻塞主线程。 - 错误处理 (
dds_exception.hpp,dds_error.hpp):统一的异常捕获与错误码定义,便于调试与健壮性处理。
2.2 高级封装 (dds_wrapper/)
在核心层之上,针对机器人应用场景进行了二次封装,提供了更通用的组件和特定型号支持。
通用组件
Publisher.h/Subscription.h:封装了发布/订阅模式的细节,简化了数据发送与接收流程。crc.h:提供循环冗余校验(CRC)工具,确保数据包在传输过程中的完整性。
机器人特定支持
- 多型号适配:内置了对 Go2 (四足机器人)、G1 (人形机器人) 等多种机型的特定通信逻辑支持。
- 即插即用:开发者无需关心底层网络拓扑,即可针对不同机型进行通信配置。
2.3 IDL 数据类型定义 (idl/)
IDL (Interface Definition Language) 文件定义了通信数据的结构,是通信双方“对话”的语言。
主要消息类型
- 运动控制类
LowCmd_: 底层电机控制指令(扭矩、位置、速度模式)。SportModeCmd_: 高层运动原语指令(如站立、行走、跳跃)。
- 状态反馈类
LowState_: 底层电机状态反馈(电流、温度、编码器读数)。IMUState_: 惯性测量单元数据(加速度、角速度、四元数)。
- 传感器数据类
- 激光雷达、深度相机点云数据等。
ROS2 兼容性
为了实现与 ROS2 生态的无缝集成,SDK 预定义了一套标准消息映射:
提示:这种兼容性允许开发者直接使用 ROS2 的工具链(如 Rviz, Rosbag)进行数据可视化和记录。
2.4 基础设施支撑
除了通信核心,SDK 还包含必要的系统级支持模块:
- 线程管理 (
thread/):内置线程池与异步任务调度器,优化高并发下的数据处理性能。 - 日志系统 (
log/):提供分级日志记录(Debug, Info, Warn, Error),支持日志轮转与文件输出。 - 序列化 (
robot/serialize/):高效的数据序列化/反序列化引擎,减少网络传输开销。 - 服务模型 (
robot/server/,robot/client/):基于 Request-Reply 模式的 RPC 通信实现,适用于配置下发或一次性查询。
3. 核心特性总结
| 特性 | 描述 | 优势 |
|---|---|---|
| 🚀 高性能 | 基于 DDS 协议,采用共享内存或 UDP 传输 | 微秒级低延迟,满足实时控制需求 |
| 🛡️ 高可靠 | 灵活的 QoS 策略配置 | 在网络波动下保证关键指令不丢失 |
| 🌐 跨平台 | 支持 Linux (Ubuntu), 甚至部分嵌入式系统 | 部署灵活,适配多种计算单元 |
| 🧩 易用性 | 多层级 API 设计 (Easy/Native) | 降低入门门槛,同时保留高级定制能力 |
| 🤖 ROS2 原生 | 消息类型与 ROS2 标准对齐 | 轻松接入现有 ROS2 算法栈 |
4. 使用示例 (伪代码)
以下展示如何使用简易模型发布一条运动指令:
cpp
#include "unitree/dds/dds_easy_model.hpp"
#include "unitree/idl/go2/LowCmd_.hpp"
int main() {
// 1. 初始化 DDS 环境
unitree::dds::init();
// 2. 创建发布者 (指定 Topic 名称和数据类型)
auto publisher = unitree::dds::create_publisher<unitree::go2::LowCmd_>("rt/lowcmd");
// 3. 构造控制指令
unitree::go2::LowCmd_ cmd;
cmd.mode_pr = 0; // 设置模式
// ... 填充具体的电机扭矩或位置数据 ...
// 4. 发布数据
publisher->publish(cmd);
// 5. 清理资源
unitree::dds::shutdown();
return 0;
}5. 结语
Unitree SDK2 的通信中间件不仅仅是一个简单的消息传输工具,它是一个专为足式与人形机器人设计的工业级通信框架。通过深度融合 DDS 标准与机器人业务逻辑,它在保证实时性与可靠性的同时,极大地降低了开发者的集成成本,是构建复杂机器人应用系统的坚实基石。